139-0510-5992(微信号)
177-6896-6998
139-0510-5992(微信号)
177-6896-6998

小龙人论坛最精准资料
业务专线:13905105992(微信号)
业务电话:17768966998
业务联系人:王三祥
邮编:224007
邮箱:yubozdh@163.com
地址:江苏省盐城市经济技术开发区漓江 路42号昱博产业园
网址:zhongyouhongtuo.com


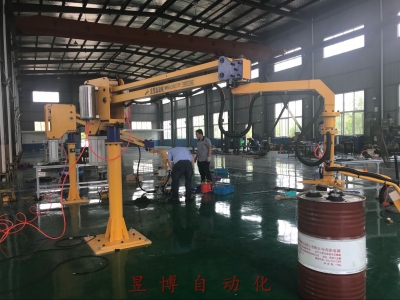
助力机械手是在机械化、自动化生产过程中发展起来的一种新型装置。在现代生产过程中,助力机械手被广泛的运用。助力机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,助力机械手已受到许多部门的重视,并越来越广泛地得到了应用。
立柱式助力机械手的基本要求是能快速、准确的拾、放和搬运物体,这就要求它们具有精度高、反应快、一定的承载能力、足够的工作空间和灵活的自由度以及在任意位置都能自动定位等特性。
设计立柱式助力机械手的原则是:充分考虑作业对象的作业技术要求,拟定较为合理的工序和工艺,并满足系统功能要求和环境条件;明确工件的结构形状和材料你特性,定位精度要求,抓取、搬运时的受力特性、尺寸和质量参数等,从而进一步确定对助力机械手结构及运行控制的要求;尽量选用标准组件,简化设计制造过程,兼顾通用性和专用性。
立柱式助力机械手微操作力控制,是提升系统采用微操作力控制方式。提升系统的微操作力控制原理是仅仅利用末端操作器检测操作者施加的微操作力,通过在线的实时处理,及时响应操作者的上下动作,大大降低惯性,延展操作者的手臂,这是提升系统的指尖控制调节模式。为了实现负载位置的精细移动调节,设置了提升系统的微调模式,即利用按钮开关实现负载重物的位置微小调节,每次移动速度能达到0.5mms,实现位置精确调节。